Робототехника — отрасль науки и техники, занимающаяся проектированием, конструированием, производством и эксплуатацией роботов. Робототехника тесно связана с механикой, информатикой, электроникой и другими научными дисциплинами.
Робот (от чешского слова robota — «принудительный труд») — программируемая, автоматически самоуправляемая/рабочая машина, используемая для выполнения задач или действий, заменяющих человеческие движения и восприятие. Робот заменяет человека в задачах, с которыми он не справится, но робот не может быть идеальной заменой для человека в его работе или выполнять функции, подобные человеческим. Существует множество типов роботов: промышленные, военные, исследовательские, медицинские, сельскохозяйственные и бытовые роботы.
Первое поколение
К первому поколению относятся роботы с более легкой архитектурой, которые могут успешно функционировать только в точно определенных (детерминированных) условиях. Если программа хранится в памяти робота и не изменяется во время работы робота, то это робот с жестким программным управлением. Такие роботы не осознают свое окружение и, следовательно, не имеют возможности получать внешнюю обратную связь. Управление перемещением манипулятора в пространстве осуществляется исключительно сигналами, получаемыми от внутренних датчиков положения и скорости.
Роботы первого поколения могут захватывать объекты, положение которых в пространстве точно зафиксировано относительно робота. Роботизированная система использует технологические средства, например, обрабатываемые детали сначала ориентируются в пространстве или помещаются в кассеты с фиксированными пазами. Это существенно увеличивает стоимость роботизированной системы и снижает гибкость работы. Подводя итог, можно сказать, что задачей управляющих устройств роботов первого поколения является реализация жестко заданной программы.
Второе поколение
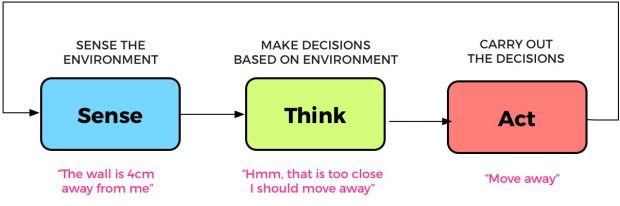
Второе поколение включает роботов, которые воспринимают окружающую среду и адаптируются к ее изменениям. Источниками внешней информации, необходимой для восприятия окружающей среды, являются различные датчики, такие как датчики прикосновения, приближения и местоположения, а также компьютерное зрение. [4] Алгоритм управления роботами второго поколения зависит от конкретной ситуации в рабочей зоне .
Различные ситуации требуют от роботов разных действий, поэтому устройство управления роботами второго поколения, помимо реализации алгоритма управления, должно также перенастраивать алгоритм при необходимости. Работой роботов управляет программа более высокого уровня, которая изменяет программу работы робота в зависимости от ситуации. Это означает, что ввиду сложности целесообразно распределить функции управления между различными уровнями и использовать иерархическое управление.
Третье поколение
Роботы третьего поколения автономны и могут работать в основном без человеческого контроля. Такие роботы имеют центральную систему управления. Роботы этого поколения быстро обучаются с помощью различных тестов, которые проводятся с помощью симуляций, моделирующих физические, психологические и культурные факторы.
Физические факторы включают форму, вес, прочность, текстуру, внешний вид и удобство обращения с объектом. Психологические факторы, которые теперь используются как в отношении людей, так и роботов. Сюда входят цели, убеждения, чувства и предпочтения человека. Культурные аспекты включают имя, ценность, местоположение и функцию человека или вещи.
Разработка и создание таких симуляторов — это огромная работа, в которой участвуют тысячи программистов и роботов, собирающих данные о своих действиях.